Phone
+1 857 209 6440
Email
rebei@mit.edu
Autonomous MIT Moonlanding Competition Robot
2.s007 Design and Manufacturing I: Autonomous Machines Final Project
Design Process
Summary
This was the first time I've really went through the entire engineering design process from start to finish on my own and it was a very rewarding experience! On top of that, I was able to win second runner-up in the final competition.
Robot Features
- PID Line Following with IR Sensor
- RC Control of 4 Motors and 2 Servos
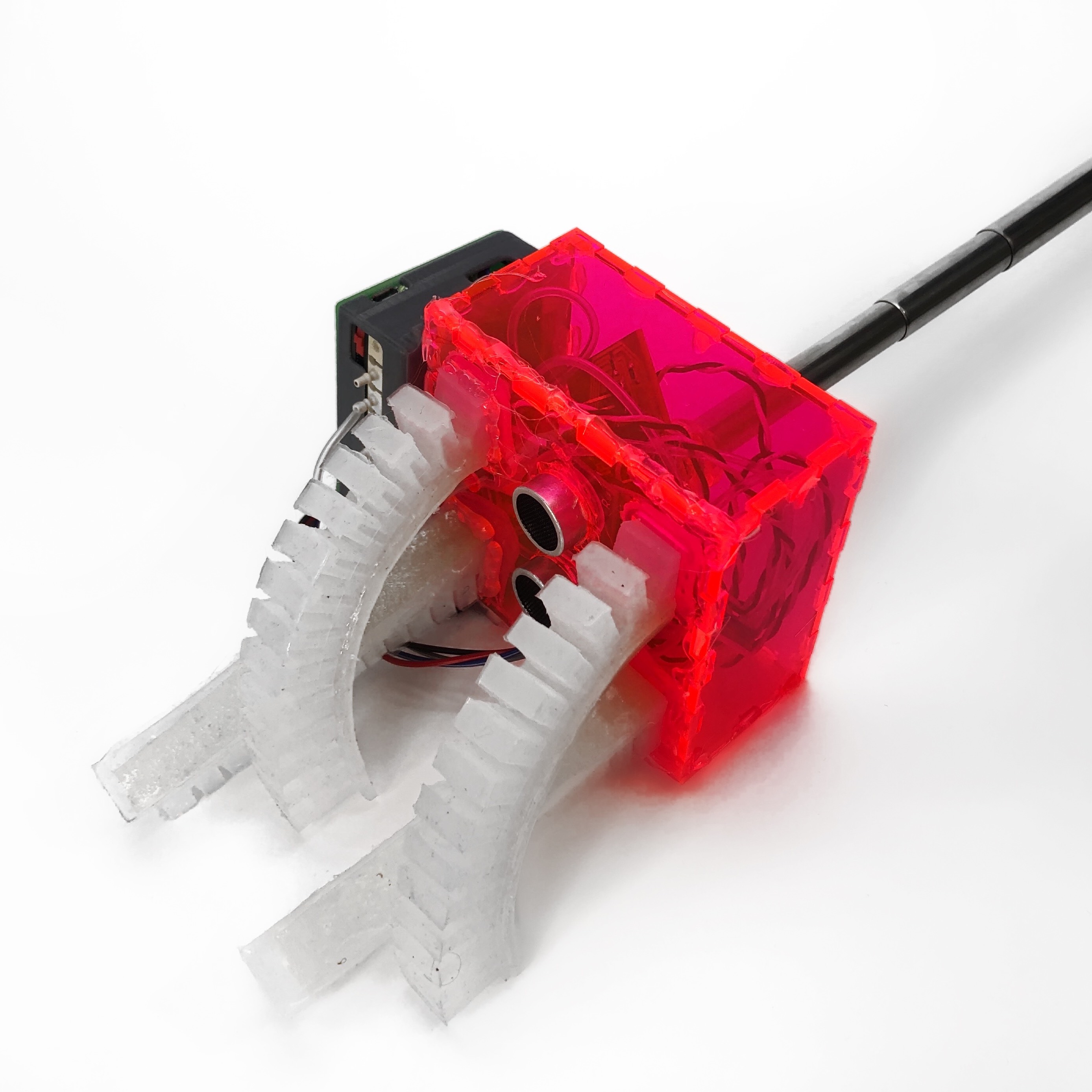
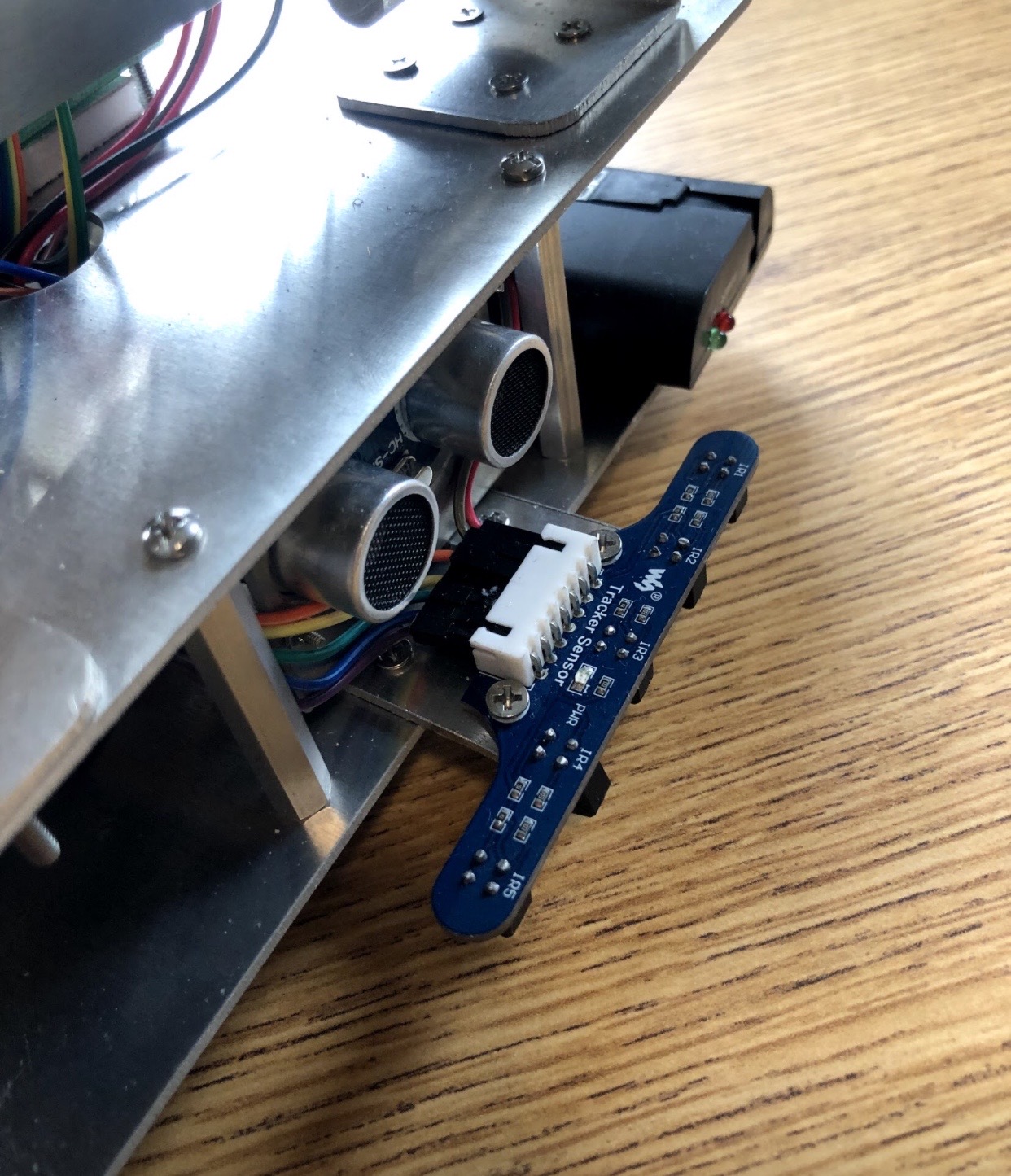
- Distance Sensing With Ultrasonic Sensor
- Gyroscope for Measuring Robot Orientation
General Gameplay and Points
Each round of play is 3 minutes long.
No part of your robot(s) can move prior to game play.
Control is a mix of autonomous mode and manual mode with no limit on the number of times you may switch between the two modes of control.
Challenges completed via autonomous mode are awarded two times the points awarded for manual mode. To indicate autonomous mode, you must set down your controller. If you fail to set down your controller, you will be awarded points as if you were operating in manual mode (even if you are operating in autonomous mode).
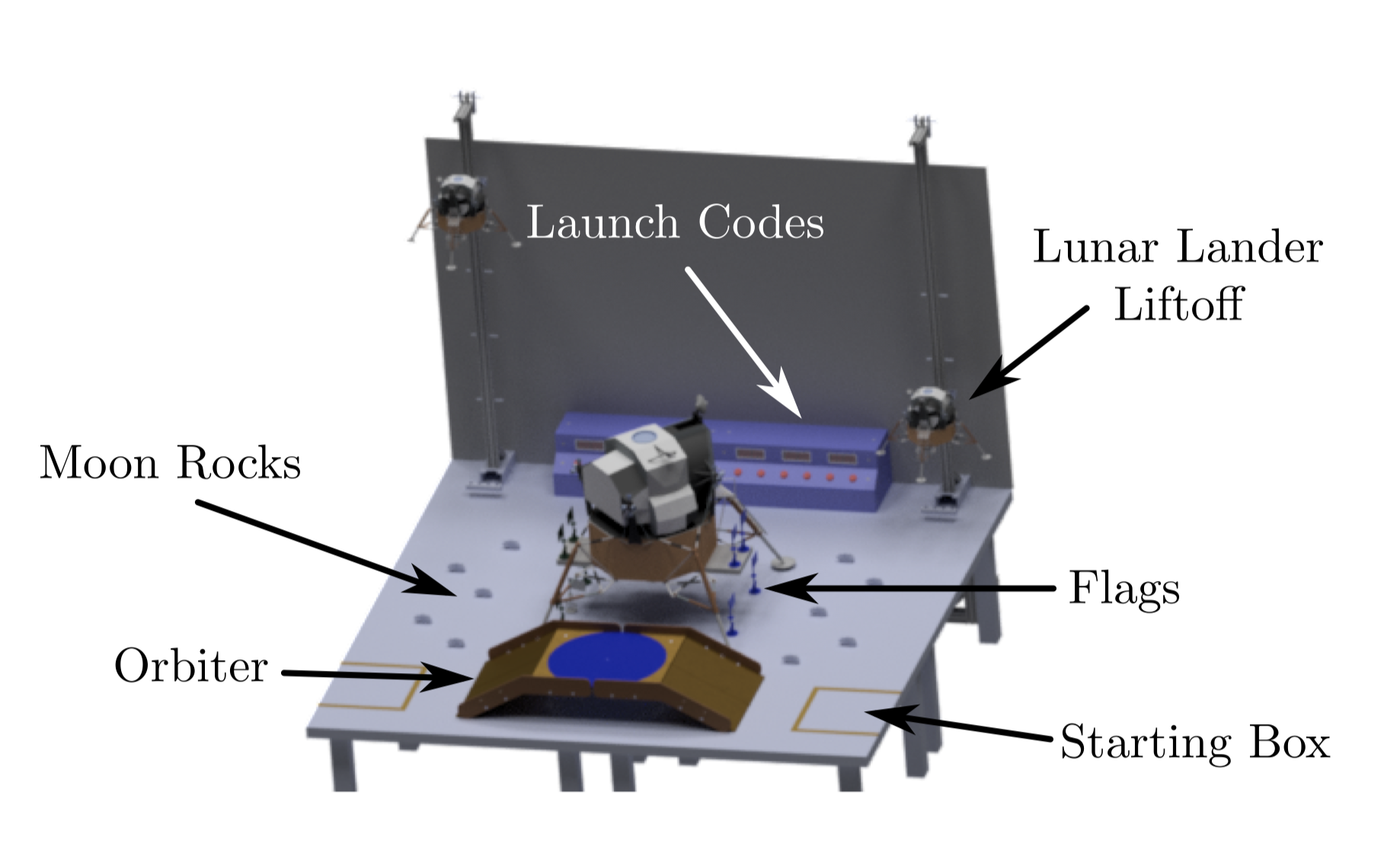
There are several scoring challenges in this game:
- Moon Rock Collection: Points are awarded for gathering moon rocks and placing them at the collection sites.
- Flag Placement: Points are awarded for picking up flags as well as placing flags at the designated locations.
- Orbiter Estimation: Points are awarded for accurate estimation of the orbiter’s angular velocity.
- Lunar Module Liftoff: Points are awarded for lifting the lunar module above marked thresholds.
- Launch Codes: Points are awarded for entering the correct digits of the launch code.
Mechanical Design
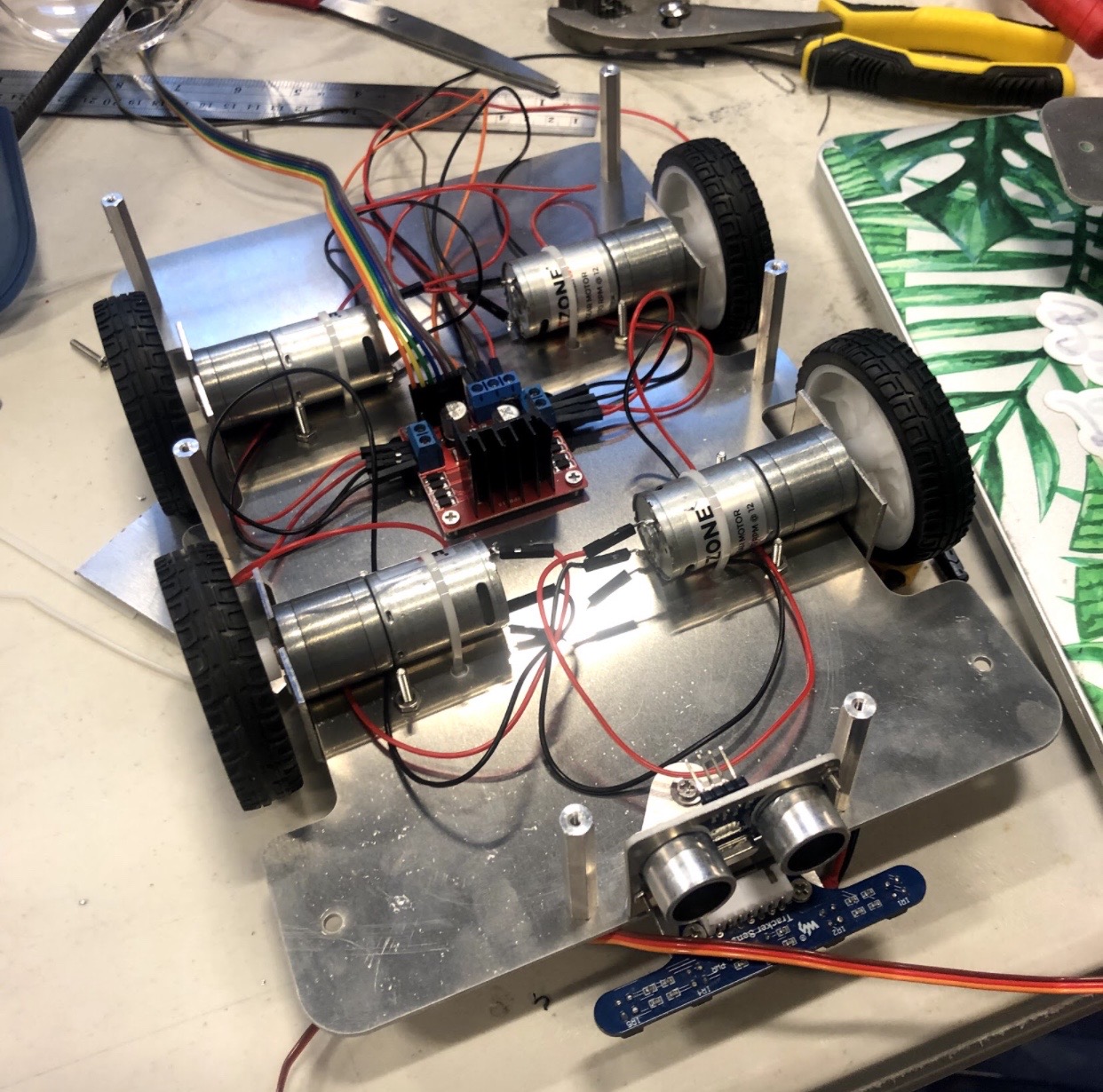
Drivetrain
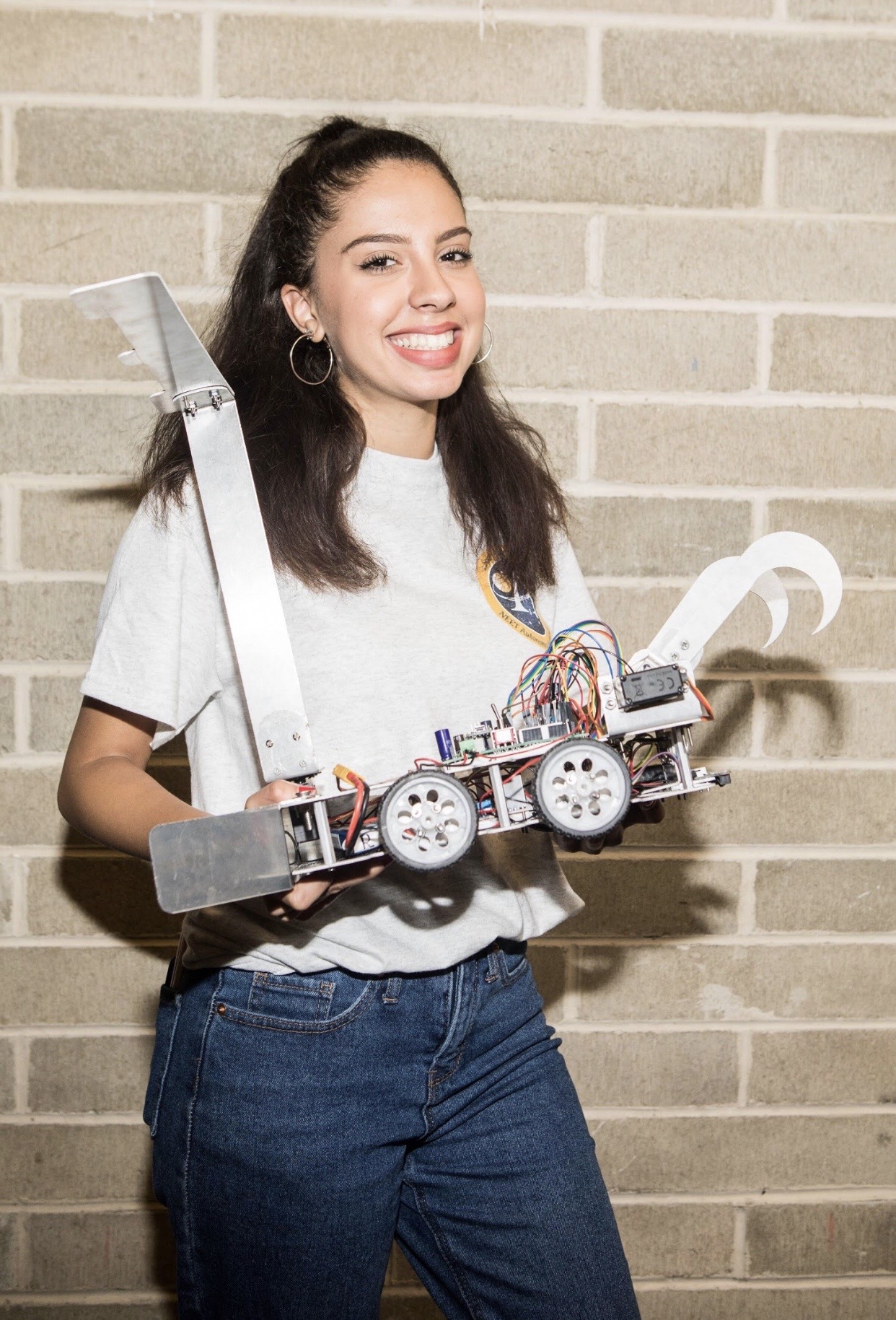
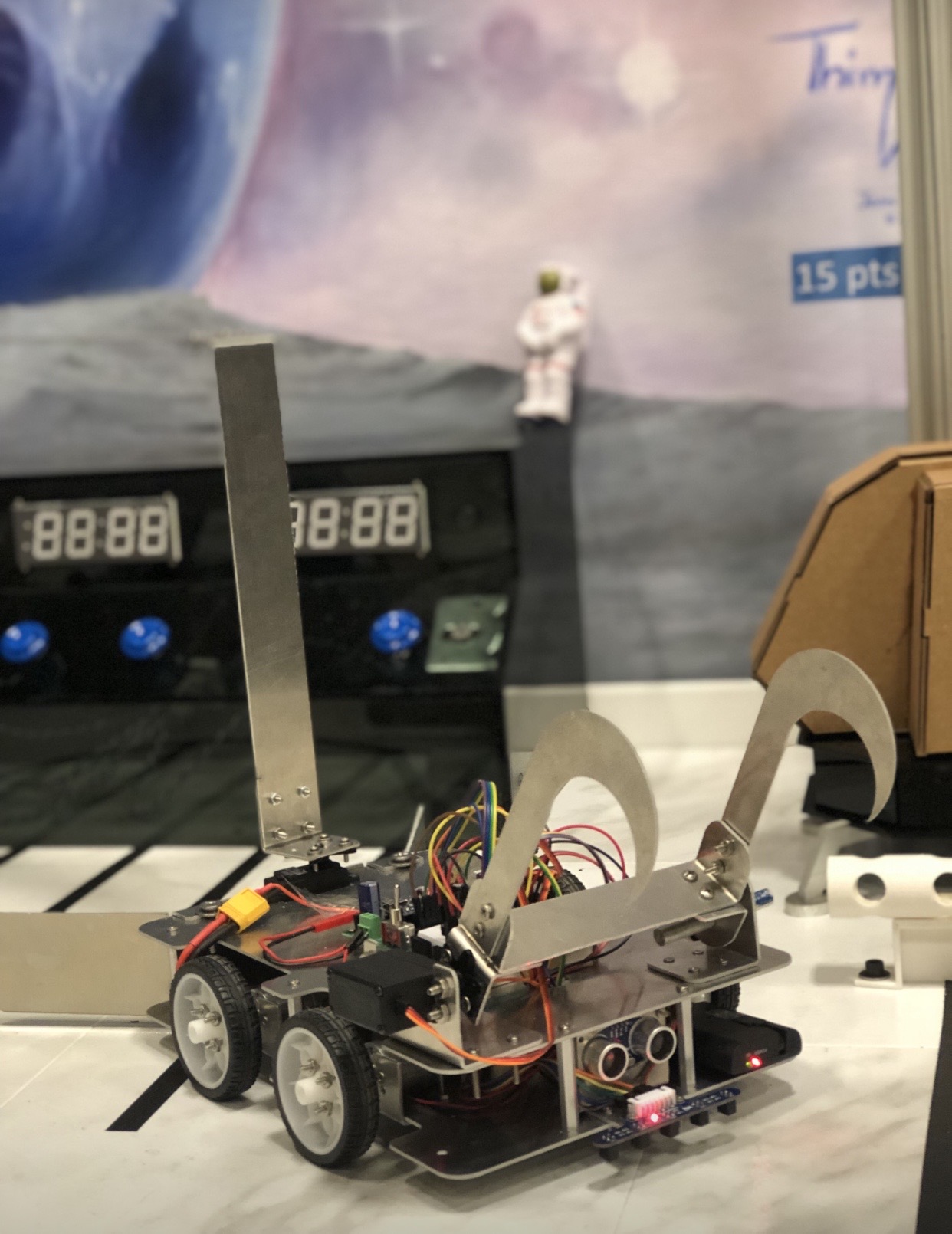
Because the task that had the most points was the lunar module liftoff, I decided that would be my focus. Points are awarded by pulling the handle horizontally, which launches the modules vertically up that have weights attached to them. In order for my robot to be able to pull a lot of weight, it needed a strong drivetrain. That is why when picking my motors, I decided to pick torque over speed.
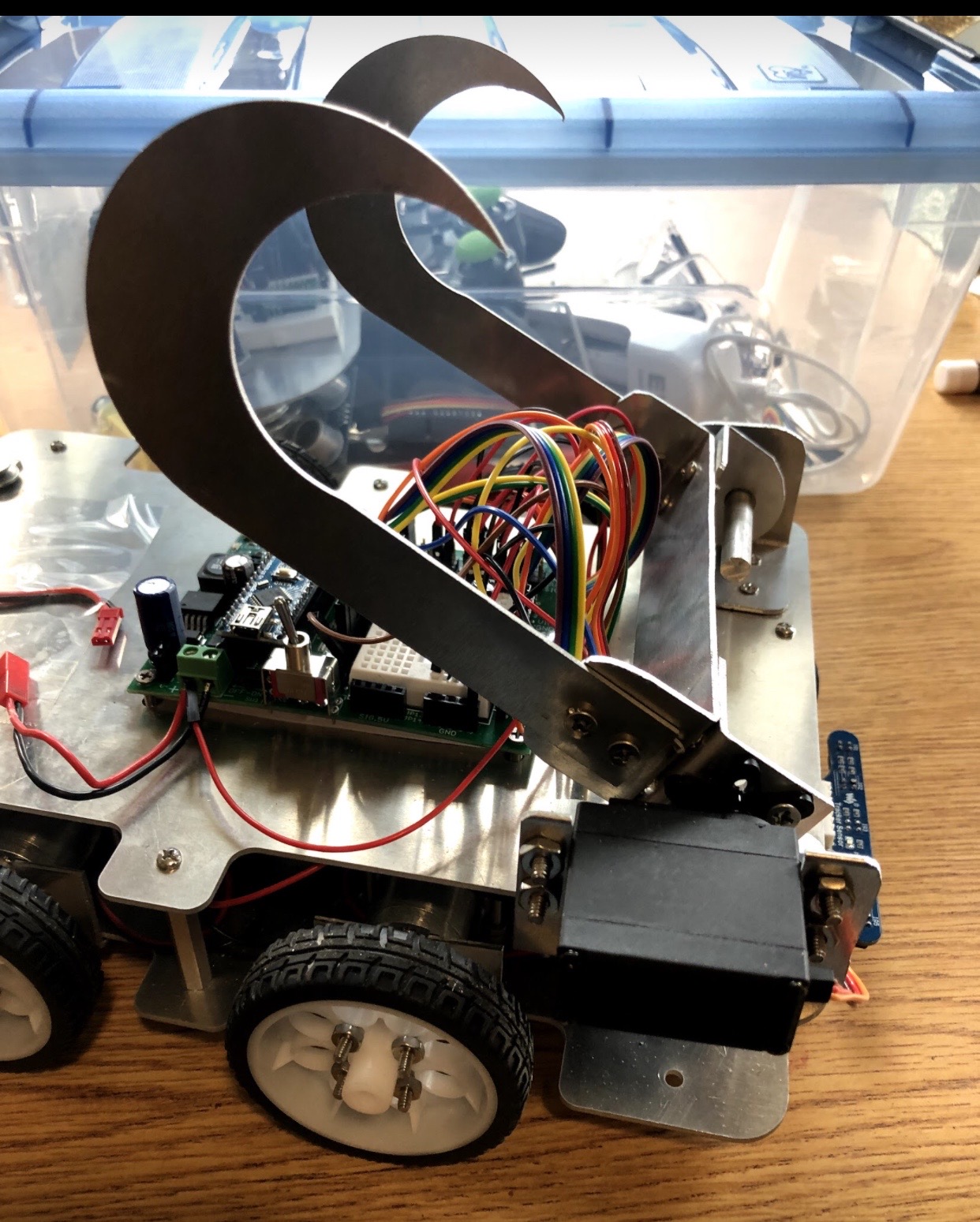
To grab onto the Lunar Module handle, I designed 2 claws that are controlled by a servo motor. On one side, the hooks were connected to the servo with sheet metal mounts I also designed. On the otherside, they were mounted to the robot with another sheet metal mount and were allowed to rotate with the addition of a metal shaft. Looking back, this design worked fine however metal on metal can create a lot of friction and instead I should've included a bearing in my design.

Electronics Design and Programming
L298N DC Motor Driver 4 DC Motors Arduino Nano Waveshare Line Tracking Sensor
More Competition Pictures


Similar Projects
Click below to explore more of my projects!