Phone
+1 857 209 6440
Email
rebei@mit.edu
Examining the Effects of Air Pressure on the Kinematics and Curvature of Soft Robotic Grippers
2.678 Measurement and Instrumentation
Abstract
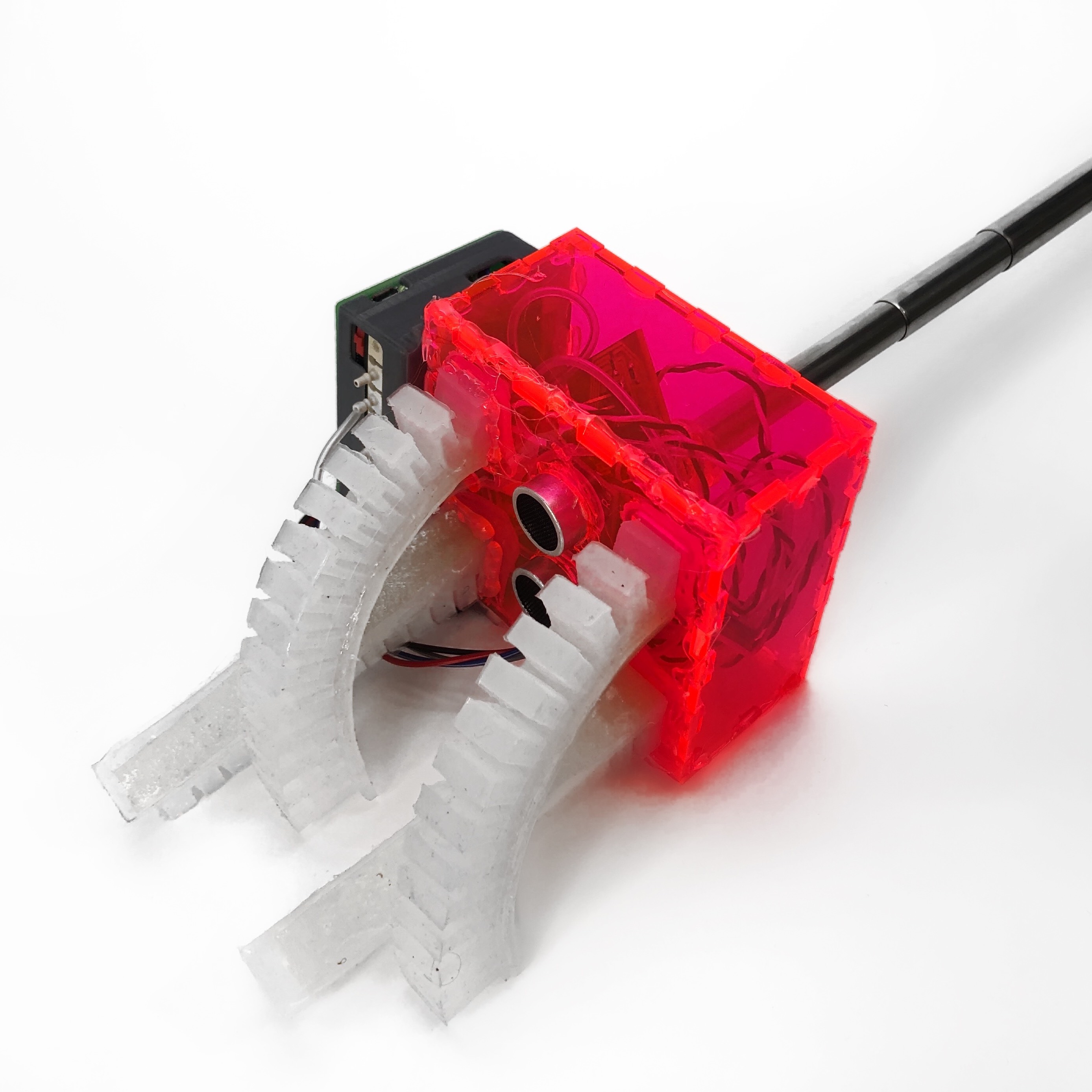
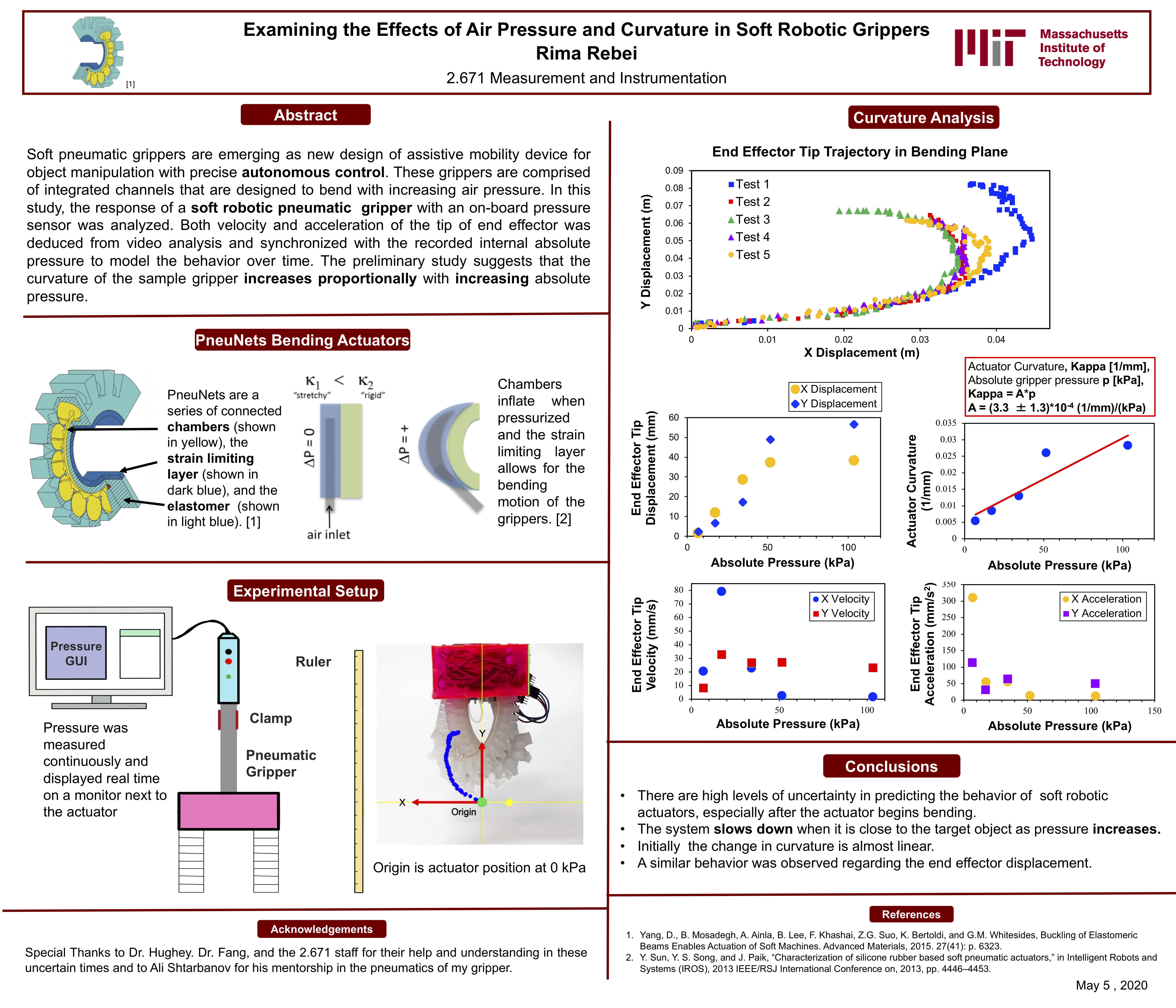
Soft pneumatic grippers are emerging as a new design of assistive mobility devices for object manipulation with precise autonomous control. These grippers are comprised of integrated channels that are designed to bend with increasing air pressure. In this study, the response of a soft robotic pneumatic gripper with an on-board pressure sensor was analyzed. The preliminary study suggests that the curvature of the sample gripper increases proportionally with absolute pressure. Results showed that the velocity of the tip of the end effector was the highest at 17.2 KPa (2.5 Psi) and the max acceleration at 6.9 KPa (1.0 Psi). The data will be used to create a control system as a response to internal pressure for a soft robotic gripper.
Key Words
Soft Robotics, Pneumatics, Gripper, Friction, Air Pressure
Similar Projects
Click below to explore more of my projects!